Li Xinzhuo
Lancaster University
Beijing Jiaotong University
Home
About Me
Projects
SocialGitHub:
GitHub
Project at CUHK(shenzhen) Robotics & AI Lab
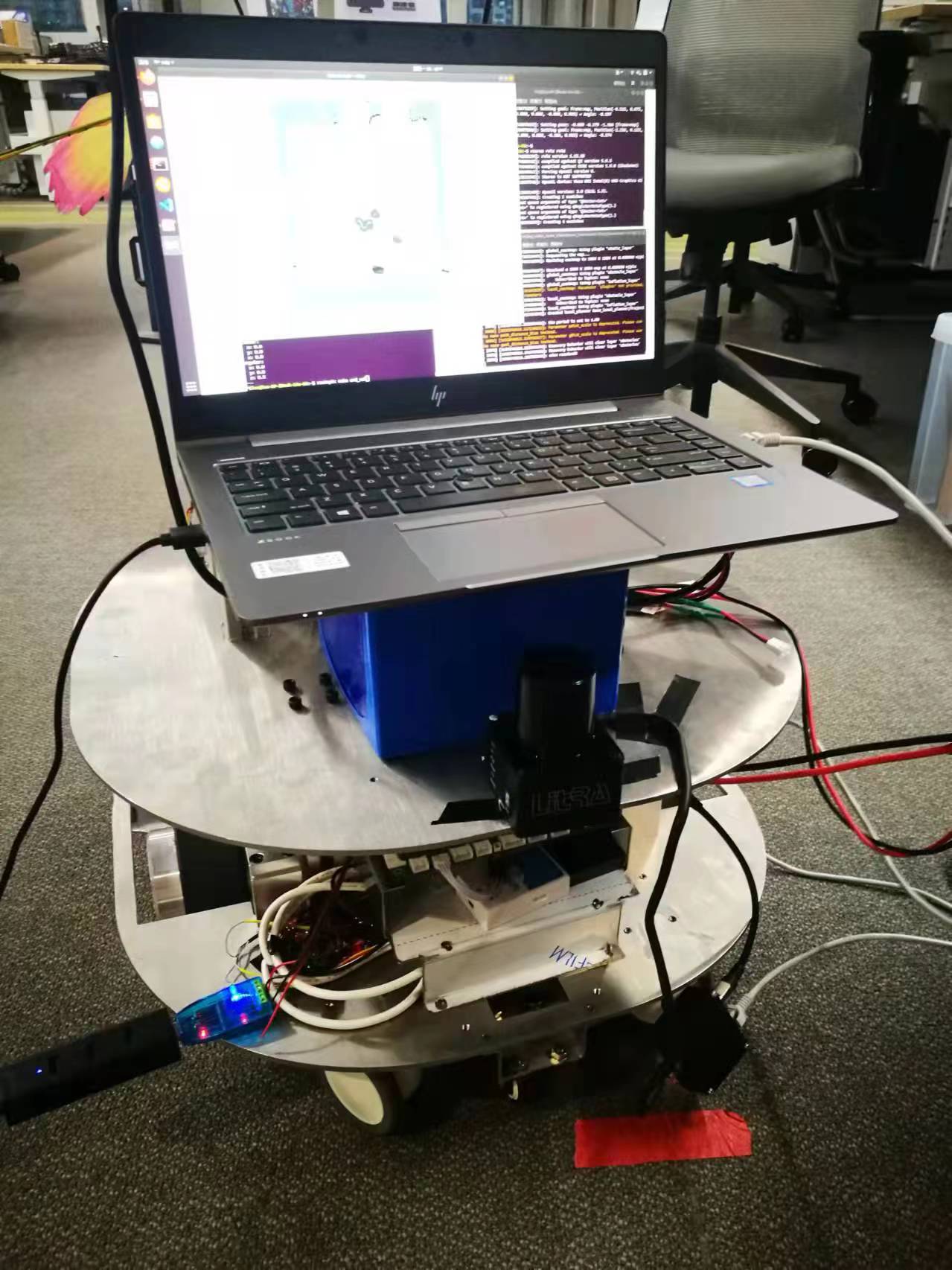
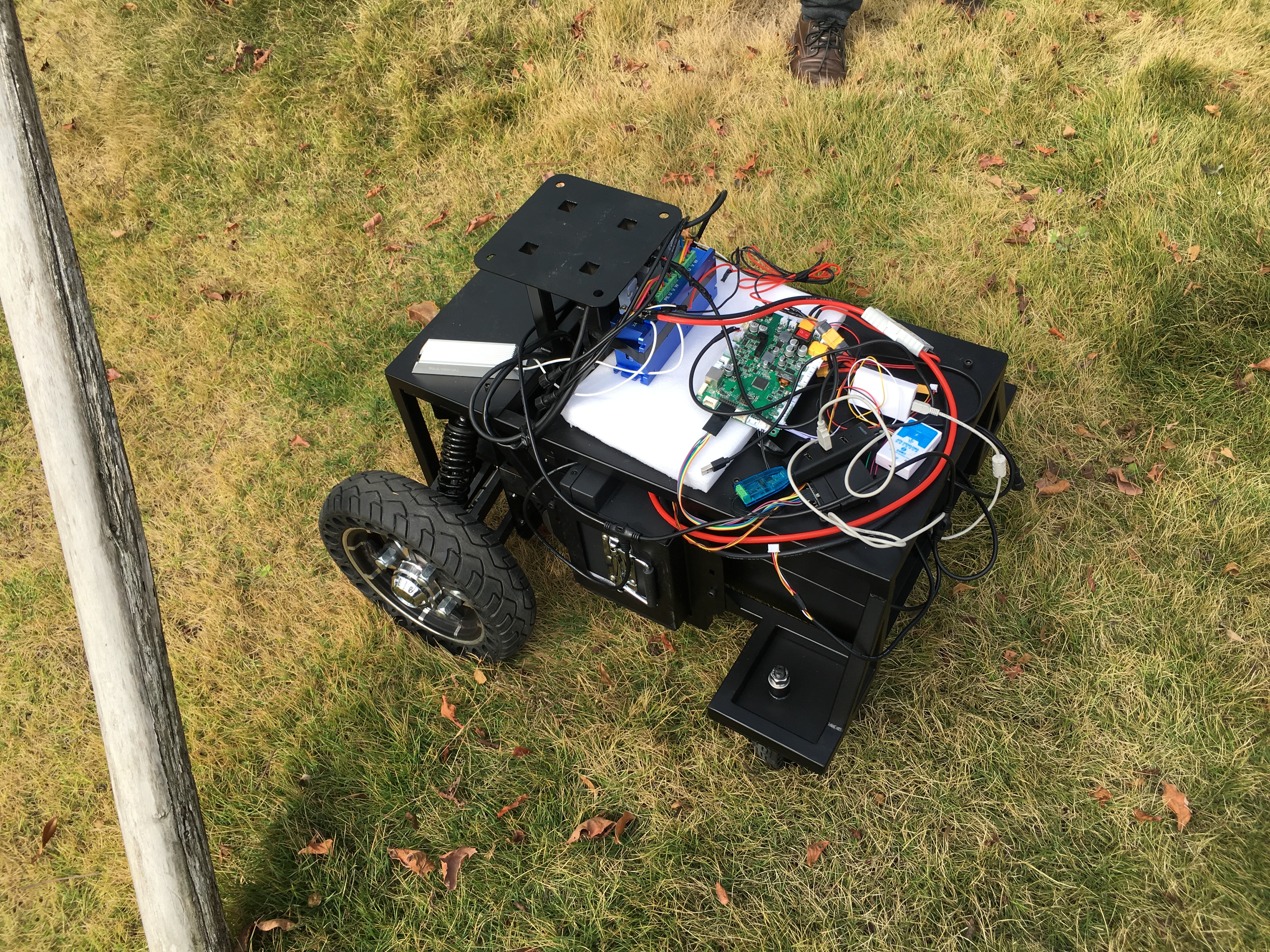
Airsbot - mobile robot using SLAM with indoor and outdoor versions
MCU (STM32): control motors and other devices, read sensors’ data to calculate odometry and communicate with host computer using RS232. Host computer: read data from stereo camera and LiDAR, based on ROS to implement mapping and navigation and communicate with remote application using ModbusTCP.
[github repository]
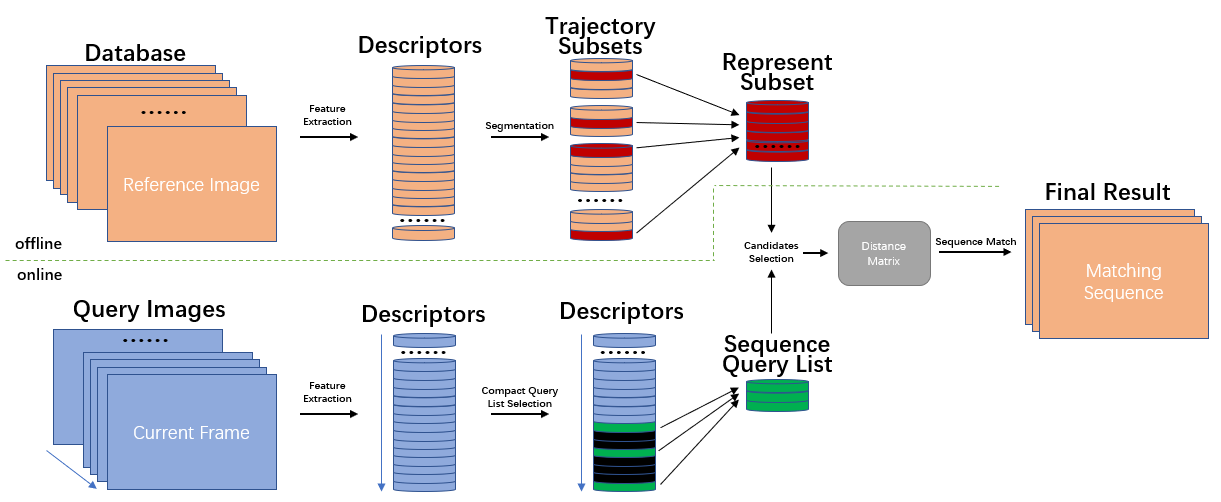
A Sequence-Based Visual Place Recognition Technique with Segmented Database and Compact Sequence List
Visual Place Recognition can be considered as an image retrieval problem which can help the loop closure step in SLAM. In this paper, I use CoHog as descriptors for images to calculate similarity to segment database and generate shorter query list to reduce searching time.
[github repository]
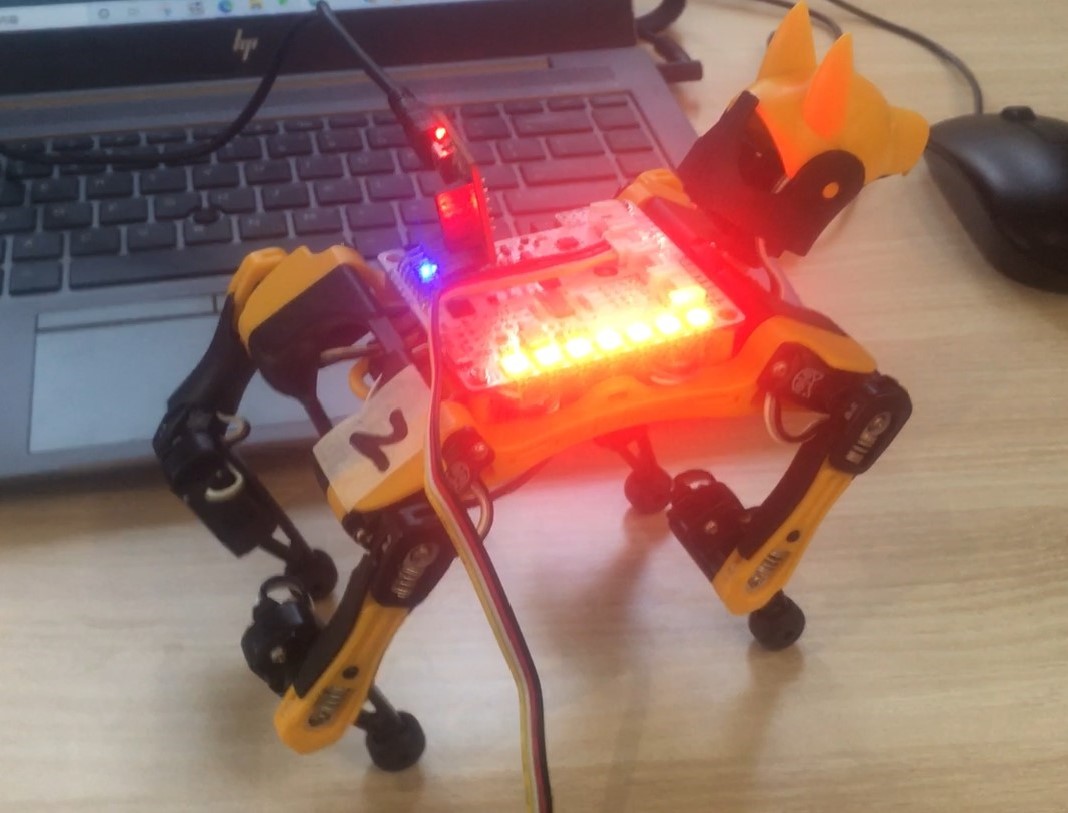
Utilizing PID algorithm to control a four-legged robot maintain balance on unstable platform
Implement self-balancing code on Arduino for a four-legged robot on unstable platform using PID.
[github repository]

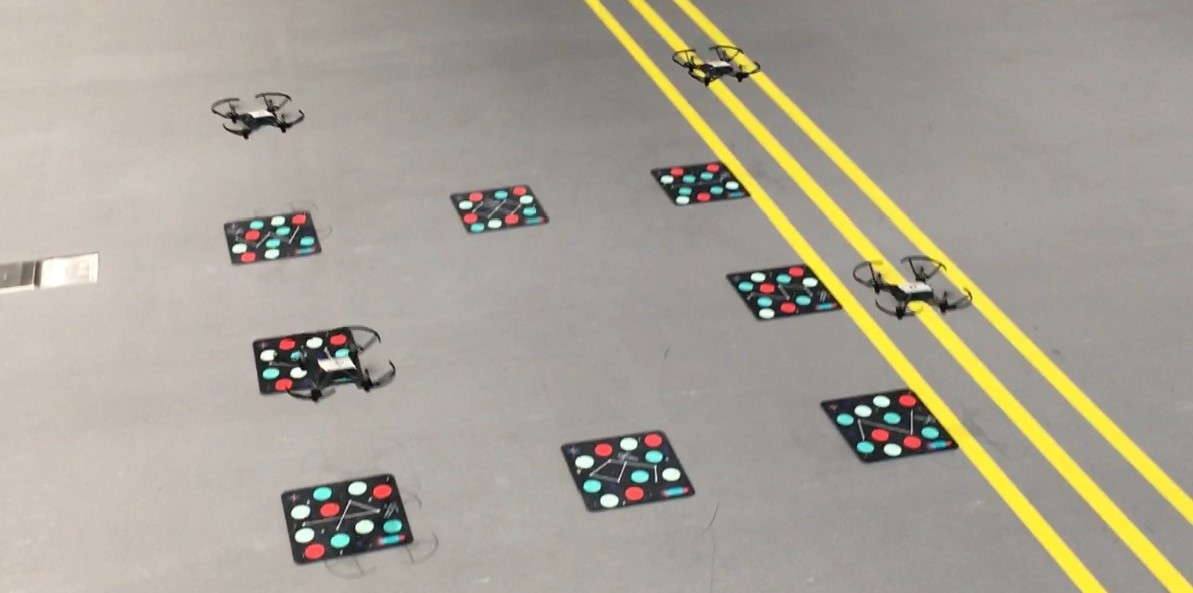
Using UDP protocol to control swarm of quad-copters
Send separate command on a simple GUI to group of quad-copters simultaneously with the help of socket communication.
[github repository]
Project at Beijing Jiaotong University
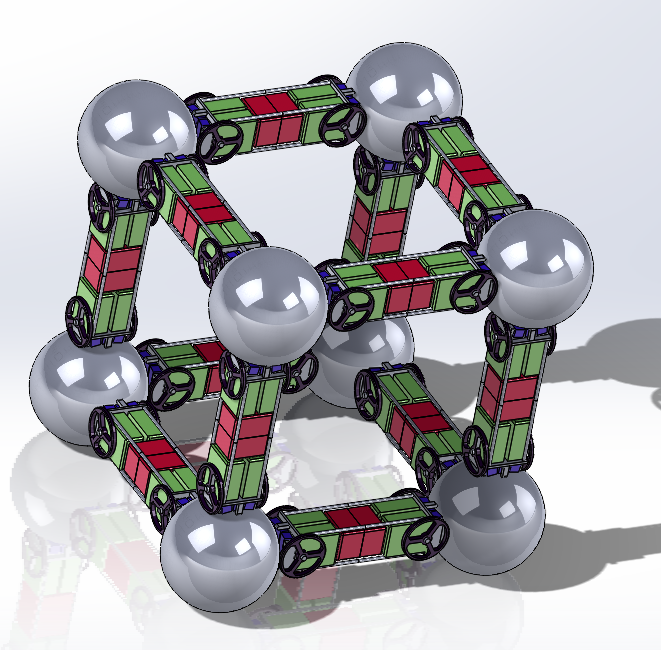
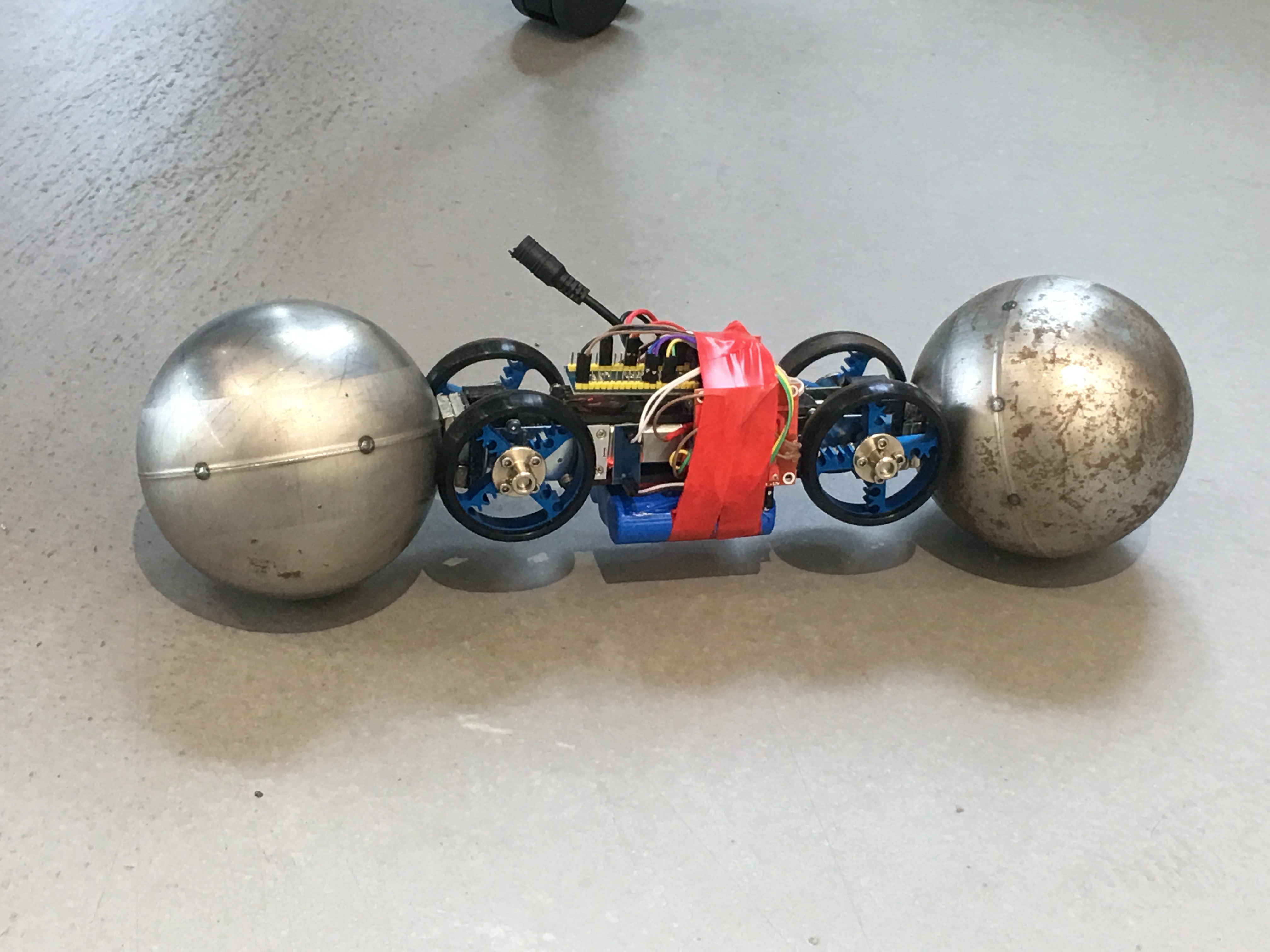
Design of Modular Self-reconfigurable Robots with a novel actuating mechanism
Design and implement a modular self-reconfigurable robot with novel actuating and docking system.
[github repository]